Ethan K. Gordon

I am a Postdoctoral Researcher at the University of Pennsylvania (GRASP) supervised by Michael Posa in the DAIR Lab. With funding from the Robotics and AI (RAI) Institute, I am developing active exploration and online learning algorithms for dexterous manipulation with sparse (e.g. tactile) perception.
In 2023, I completed my PhD in the Personal Robotics Lab at the University of Washington, where I was advised by Siddhartha Srinivasa and collaborated with Tapomayukh Bhattacharjee. My dissertation involved developing online learning algorithms for tractably adaptable food manipulation with the primary application of robot-assisted feeding for those with mobility impairments. Previously, I received my BSE from Princeton University, where I studied neuromorphic silicon photonics with Paul Prucnal.
I have also had the pleasure to work with the Honda Research Institute on in-hand manipulation and Meta (Oculus VR) on varifocal VR headsets. In my spare time, I enjoy skiing, singing a cappella, and D&D.
What's New?
| Jul 2026 | Accepted as a 2026 RSS Pioneer, see you in Sydney! |
|---|---|
| Jun 2026 | Excited to attend the Dagstuhl Seminar: "Towards Physically Assistive Robots in the Home" |
| Jun 2026 | Our active tactile exploration work is presenting at ICRA 2026, see you in Vienna! |
| May 2026 | Presented at the M3X PI Meeting. |
| Oct 2025 | Rising Star at the Northeast Robotics Colloquium (NERC) |
| Jul 2025 | On parental leave to welcome Lydian to the world! |
| Jun 2025 | The Workshop on Human-Robot Contact and Manipulation (HRCM) at RSS 2025 was a succcess! |
| Mar 2025 | Our in-home feeding system paper was nominated for Best Systems Paper at HRI 2025! |
{kind=link}
Research
Robotic manipulation can advance the human condition in so many ways: from physical assistance for those with mobility impairments to construction tasks in dangerous environments to the fine grain motions of surgery. All of these tasks require the robot to adapt to previously-unseen and uncertain environments. Just as humans continuously build and refine our understanding of this world over time, a robot should be able to treat every second of deployment as a learning opportunity. My goal is to understand how to capitalize on these opportunities to make contact-rich dexterous manipulation as intuitive to robots as it is to humans.
Select Publications
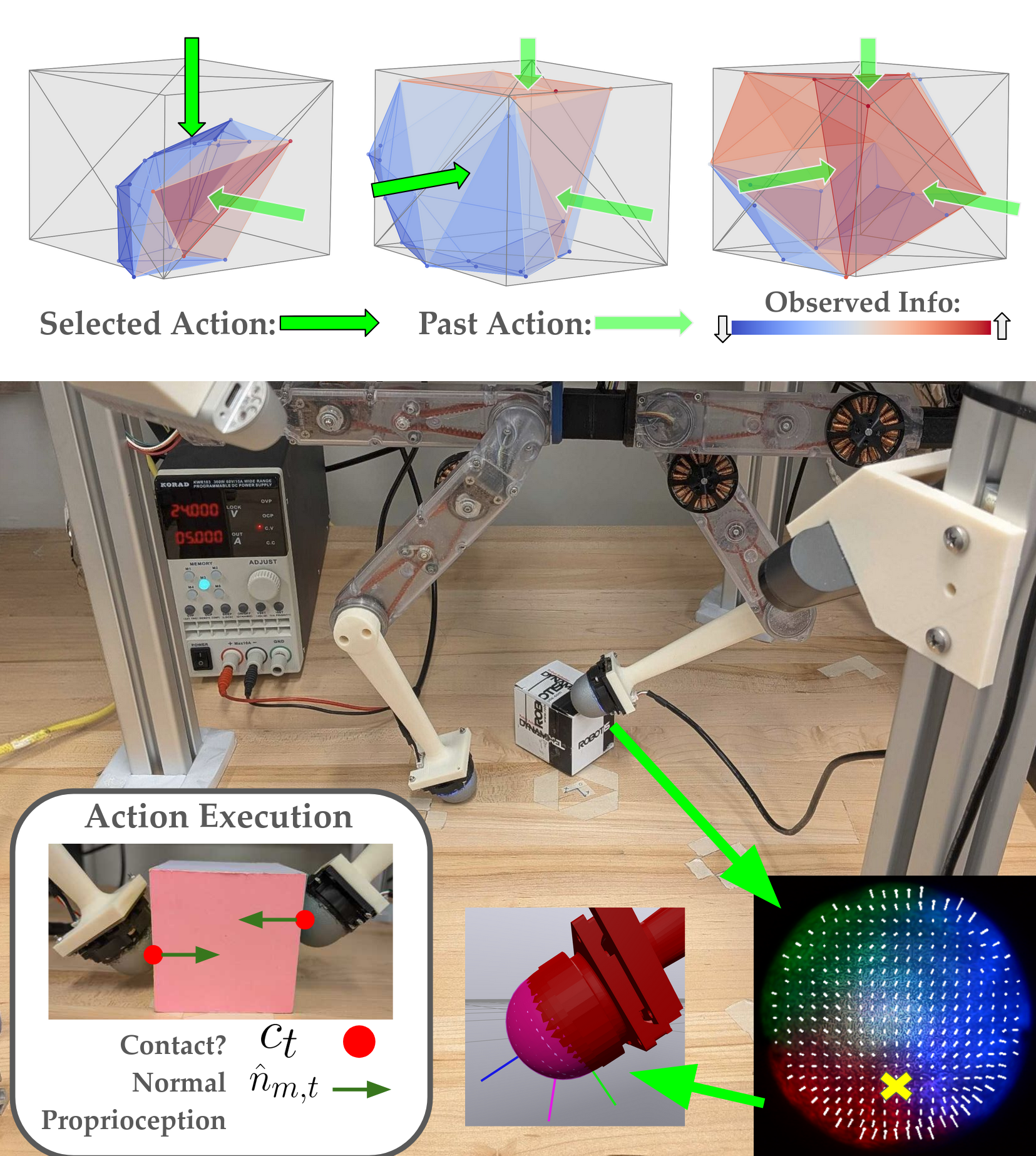
Active Tactile Exploration for Rigid Body Pose and Shape Estimation
Ethan K. Gordon, Bruke Baraki, Hien Bui, Michael Posa
International Conference on Robotics and Automation (ICRA) 2026, Vienna, Austria

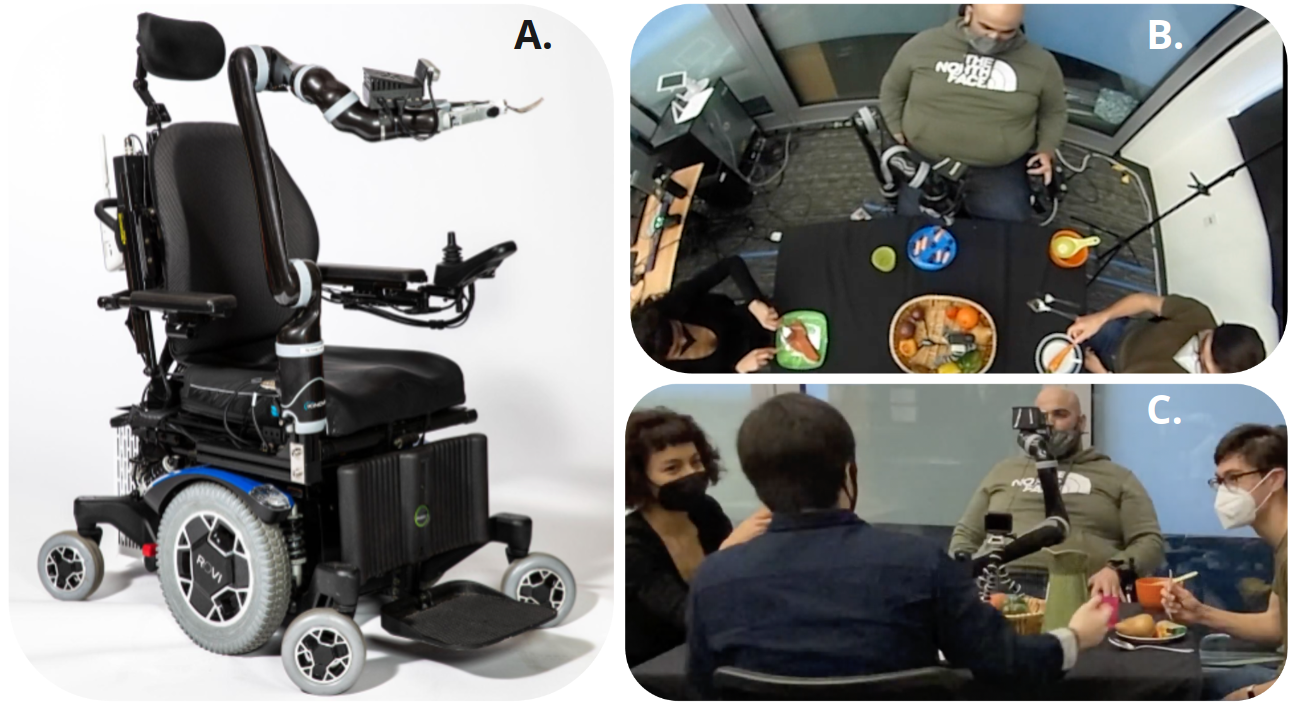
Lessons Learned from Designing and Evaluating a Robot-assisted Feeding System for Out-of-lab Use
Amal Nanavati, Ethan K. Gordon, Taylor A. Kessler Faulkner, Yuxin (Ray) Song, Jonathan Ko, Tyler Schrenk,Vy Nguyen, Bernie Hao Zhu, Haya Bolotski, Atharva Kashyap, Sriram Kutty, Raida Karim, Liander Rainbolt, Rosario Scalise, Hanjun Song, Ramon Qu, Maya Cakmak and Siddhartha S. Srinivasa
Conference on Human-Robot Interaction (HRI) 2025, Melbourne, Australia
Honorable Mention: Systems

Towards General Single-Utensil Food Acquisition with Human-Informed Actions
Ethan K. Gordon*, Amal Nanavati*, Ramya Challa, Bernie Hao Zhu, Taylor A. Kessler Faulkner, Siddhartha S. Srinivasa
Conference on Robot Learning (CoRL) 2023, Atlanta, GA, USA
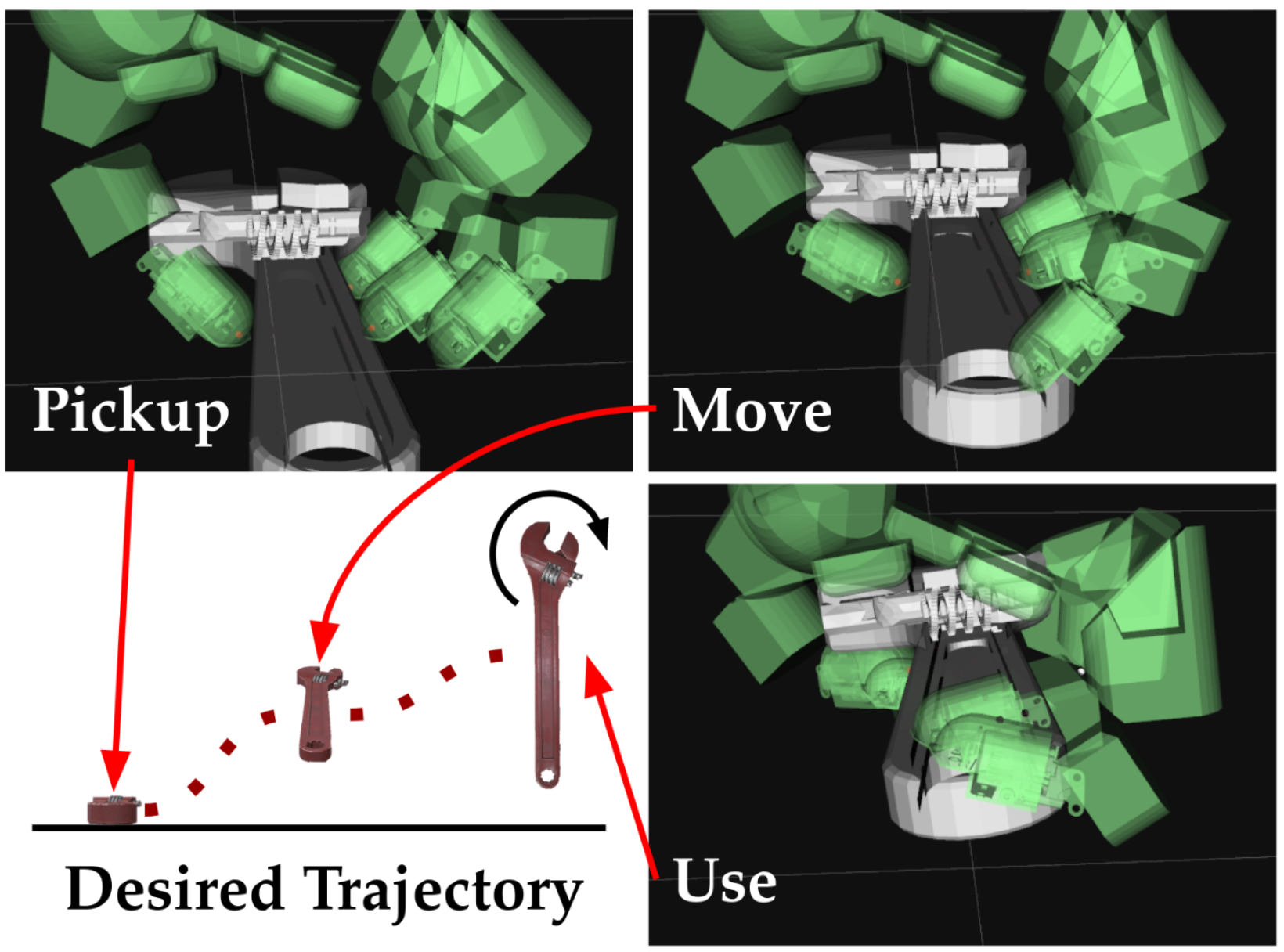
Online augmentation of learned grasp sequence policies for more adaptable and data-efficient in-hand manipulation,
Ethan K. Gordon, Rana Soltani-Zarrin
International Conference on Robotics and Automation (ICRA) 2023, London, UK
Design principles for robot-assisted feeding in social contexts
Amal Nanavati*, Patrícia Alves-Oliveira*, Tyler Schrenk, Ethan K. Gordon, Maya Cakmak, and Siddhartha S. Srinivasa
Conference on Human-Robot Interaction (HRI) 2023, Stockholm, Sweden
Best Design Paper
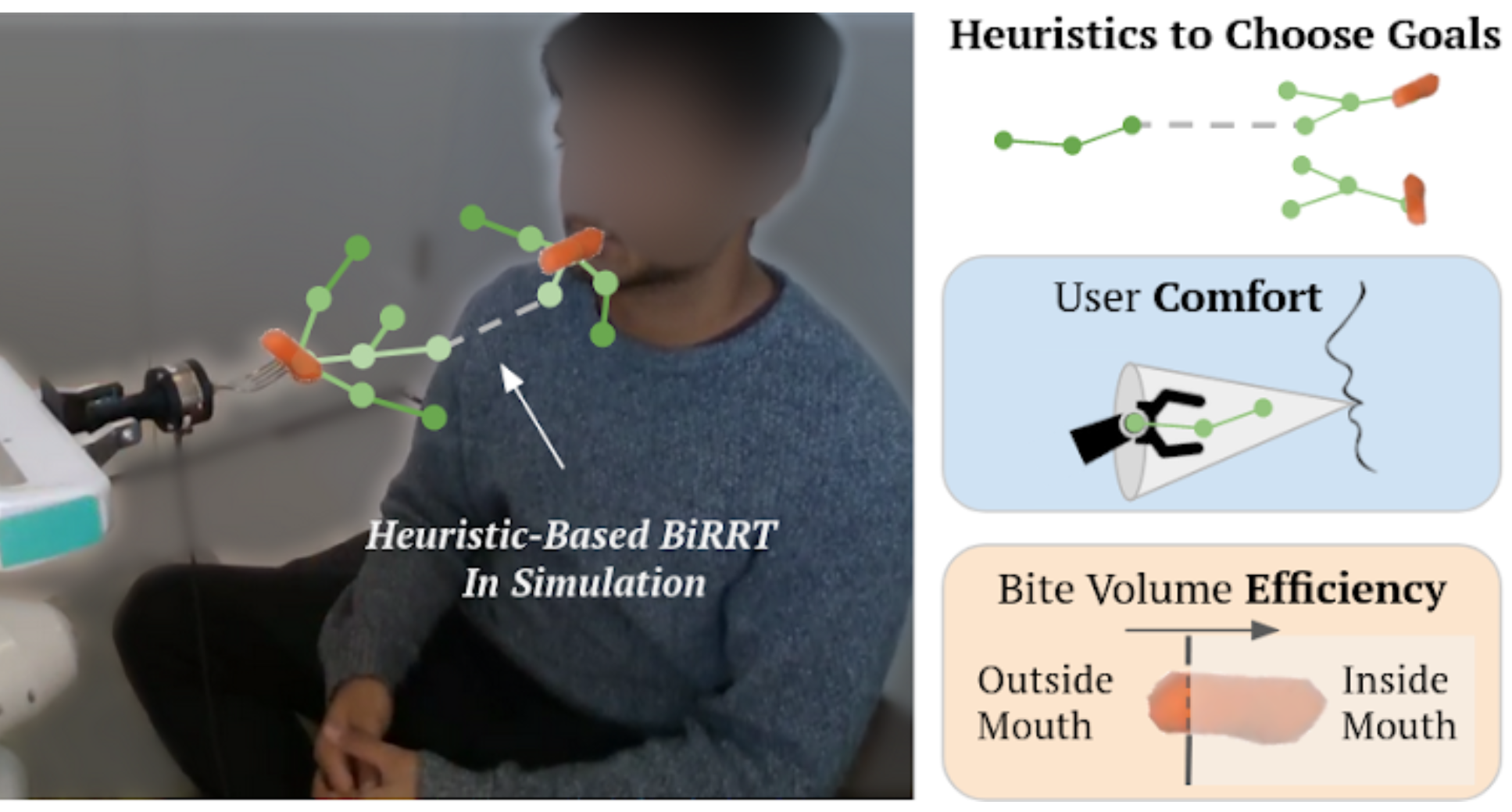
Balancing Efficiency and Comfort in Robot-Assisted Bite Transfer
Suneel Belkhale, Ethan K. Gordon, Dorsa Sadigh, Tapomayukh Bhattacharjee, Siddhartha S. Srinivasa
International Conference on Robotics and Automation (ICRA) 2022, Philadelphia, PA, USA
Benchmarking Structured Policies and Policy Optimization for Dexterous Object Manipulation
Niklas Funk, Charles Schaff, Rishabh Madan, Takuma Yoneda, Julen Urain De Jesus, Joe Watson, Ethan K. Gordon, Felix Widmaier, Stefan Bauer, Siddhartha S. Srinivasa, Tapomayukh Bhattacharjee, Matthew R. Walter, Jan Peters
IEEE Robotics and Automation Letters (RA-L), SI: Robotic Grasping and Manipulation 2021
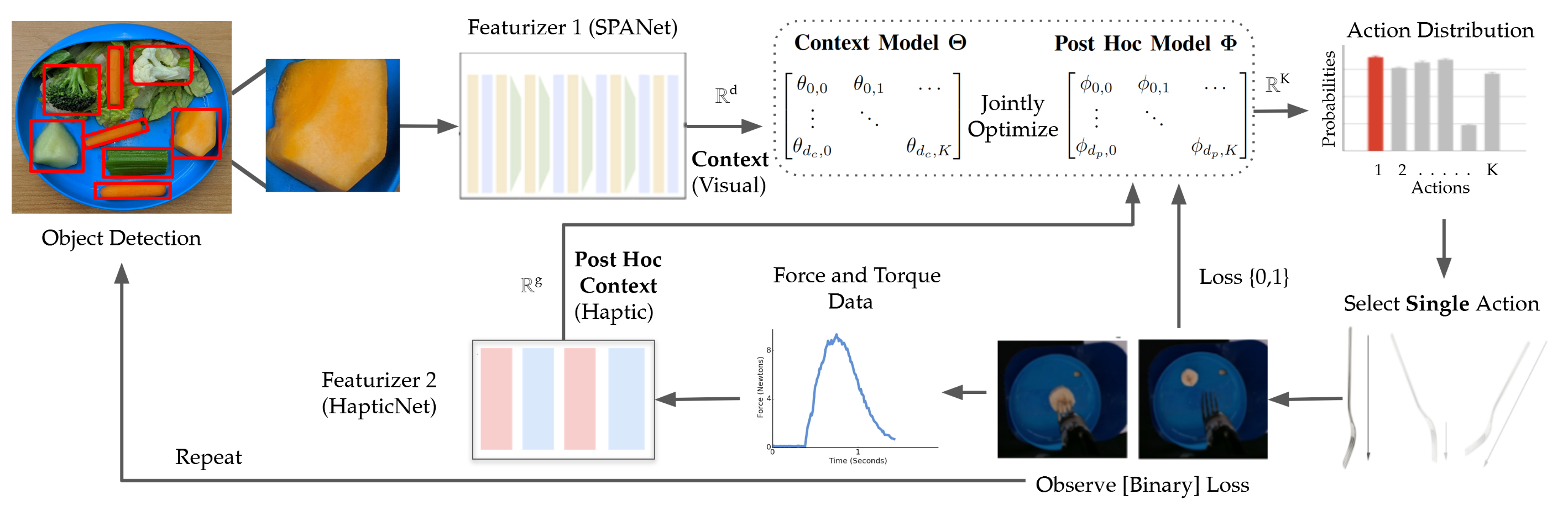
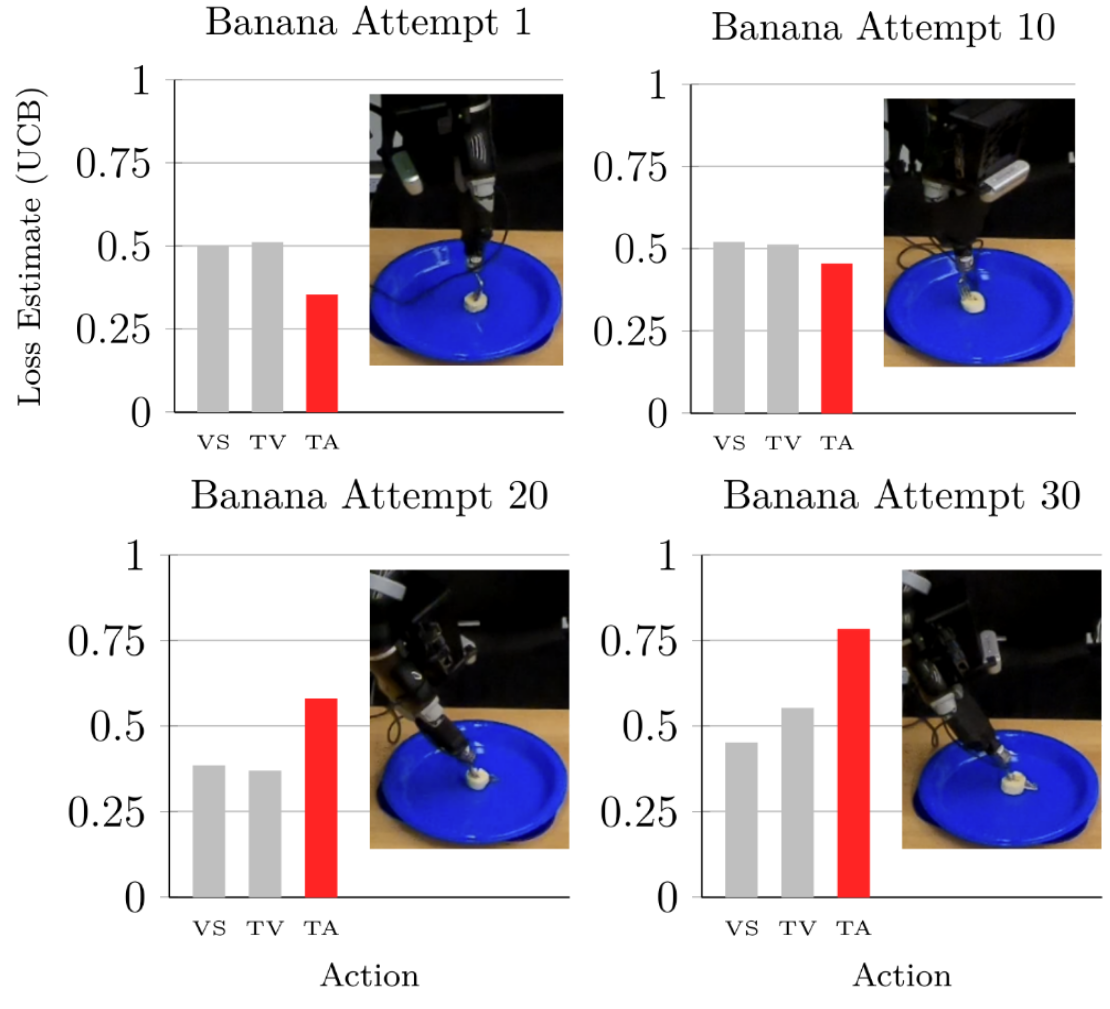
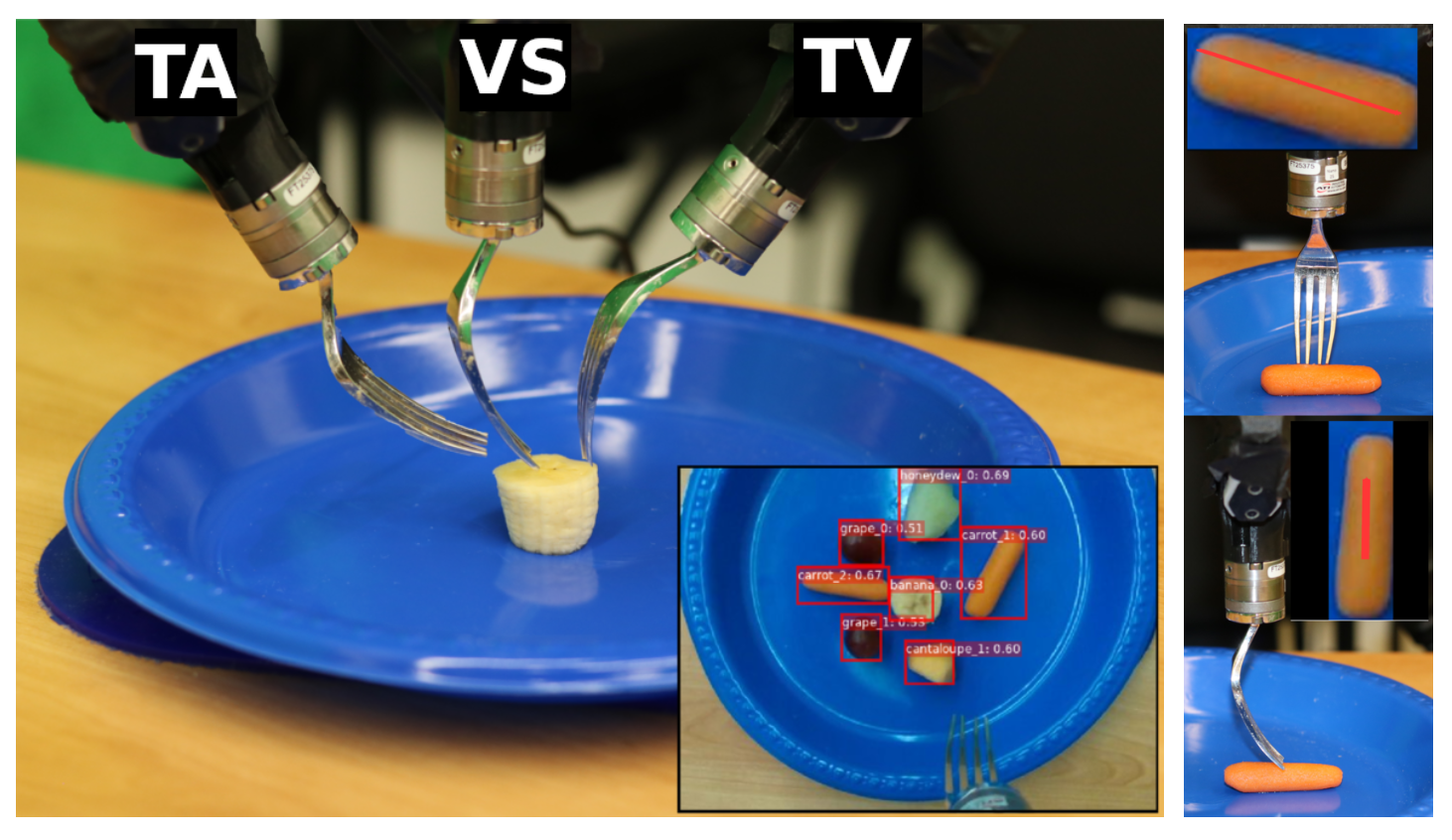
Leveraging Post Hoc Context for Faster Learning in Bandit Settings with Applications in Robot-Assisted Feeding
Ethan K. Gordon, Sumegh Roychowdhury, Tapomayukh Bhattacharjee, Kevin Jamieson, and Siddhartha S. Srinivasa
International Conference on Robotics and Automation (ICRA) 2021, Xi'an, China
Adaptive Robot-Assisted Feeding: An Online Learning Framework for Acquiring Previously-Unseen Food Items
Ethan K. Gordon, Xiang Meng, Tapomayukh Bhattacharjee, Matt Barnes, and Siddhartha S. Srinivasa
Conference on Intelligent Robots and Systems (IROS) 2020, Las Vegas, NV, USA

Is more autonomy always better? Exploring preferences of mobility-impaired users in robot-assisted feeding
Tapomayukh Bhattacharjee, Ethan K. Gordon, Rosario Scalise, Maria E. Cabrera, Anat Caspi, Maya Cakmak, and Siddhartha S. Srinivasa
Conference on Human-Robot Interaction (HRI) 2020, Cambridge, UK
Robot-Assisted Feeding: Generalizing Skewering Strategies across Food Items on a Plate
Ryan Feng, Younsun Kim, Gilwoo Lee, Ethan K. Gordon, Matt Schmittle, Shivaum Kuma, Tapomayukh Bhattacharjee, and Siddhartha S. Srinivasa
International Symposium on Robotics Research (ISRR) 2019, Hanoi, Vietnam